
概要
小さなサーボモーターは Arduino の内部電源だけで駆動させることができますが、大きなサーボモーターを動かす場合は大電流が必要になるので、別の電力源を用意する必要があります。
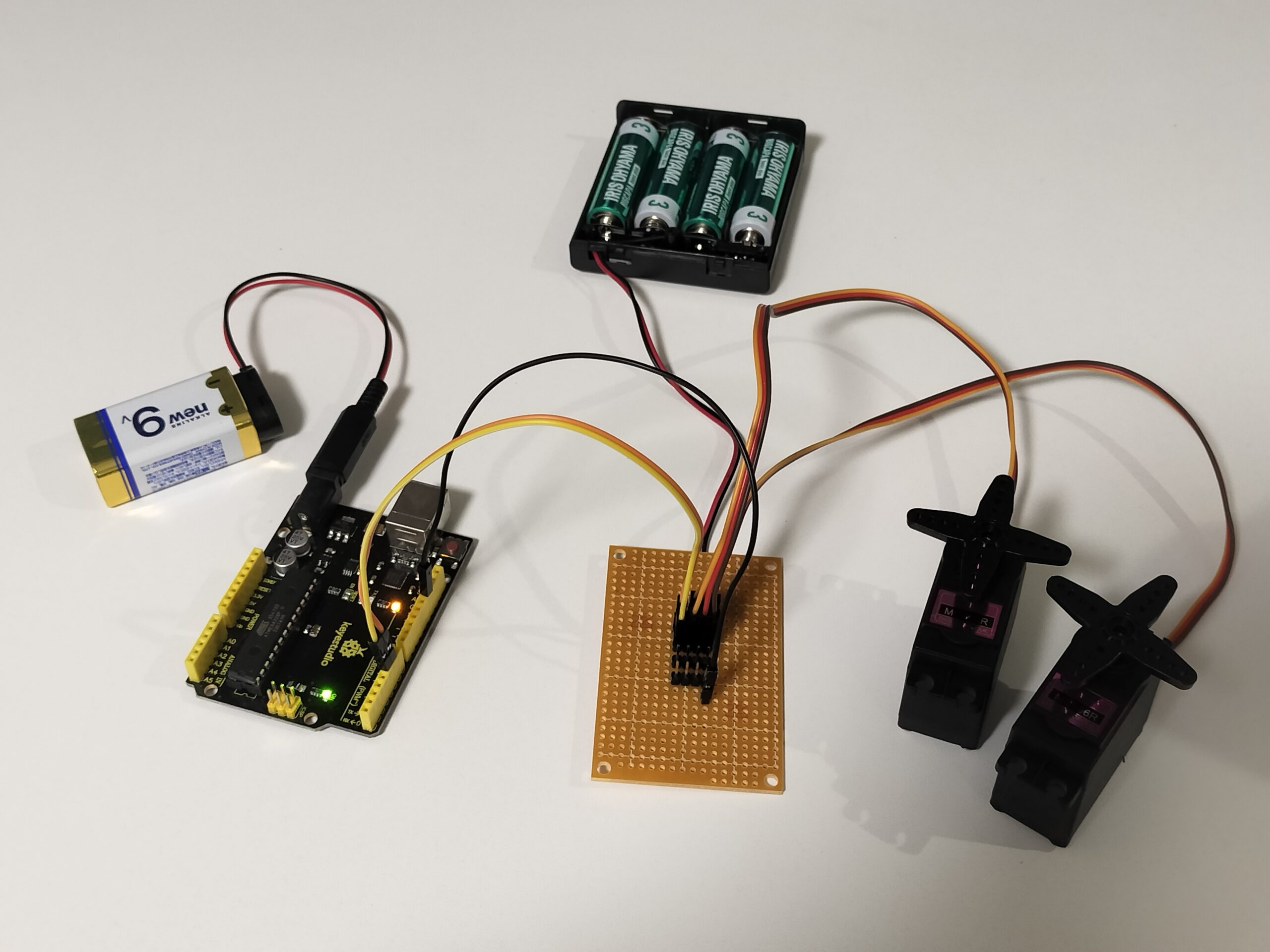
2つの電源を用意して、サーボモーターの駆動実験をしたので、簡単に記事にまとめてみます。
( ↓ 配線は、この記事をもとに行いました。)

使ったパーツ
・9V電池
・電池スナップ
・DCプラグ(無い場合はArduino直結も可)
・単3電池 4本
・電池BOX(単3×4本用)
・Arduino( uno ・ nano ・ mega など )
・サーボモーター 2個
・ユニバーサル基板
・ピンヘッダ 4ピン×4個(長いものをニッパーで切って使う)
・ピンヘッダ 1ピン×1個
・ジャンパーワイヤー オスメス 3本
・リード線 10cm 程度
作業写真

↑ パーツを集める。(※写真は記事で使った部品とは少し違う)
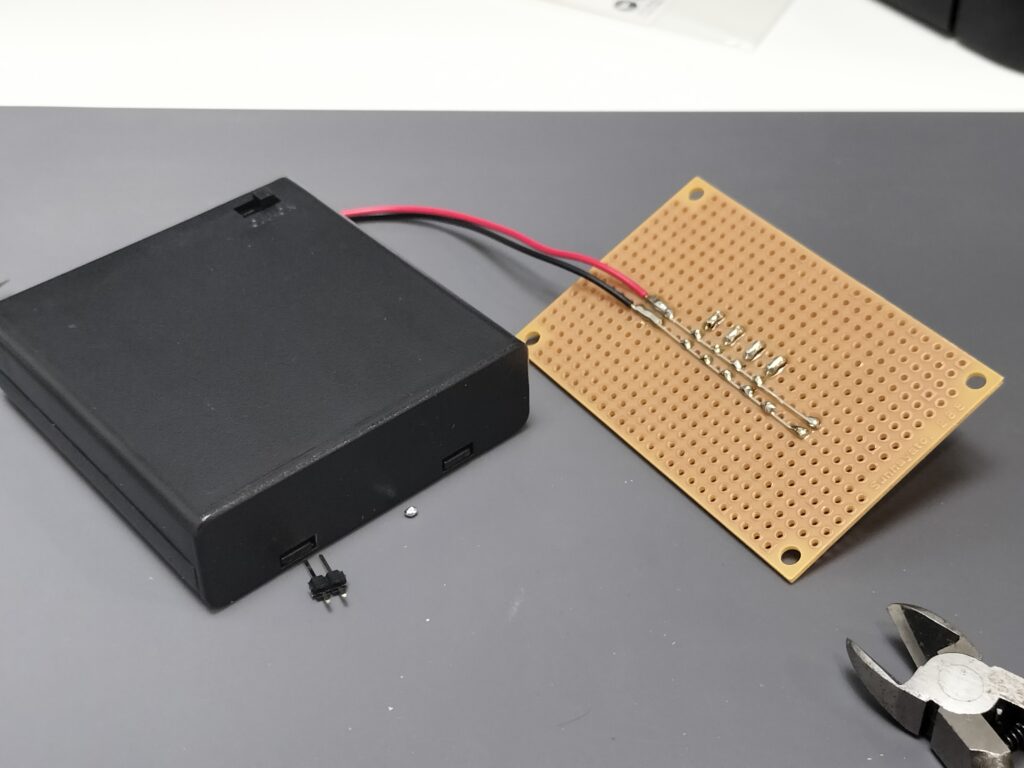
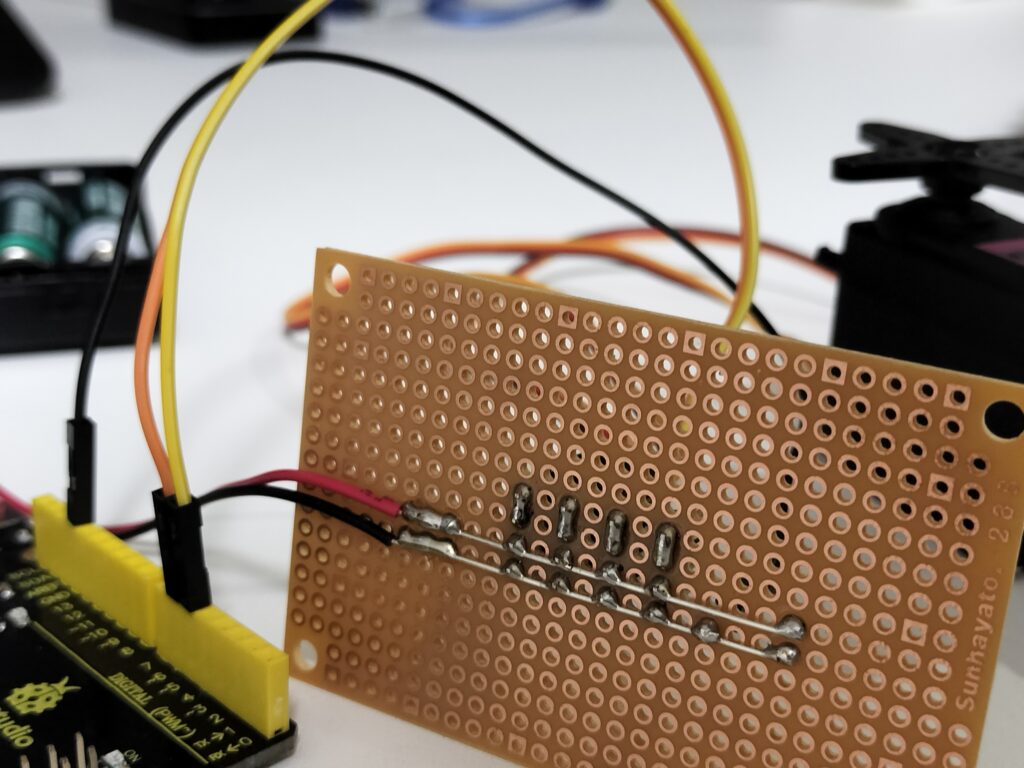
↑ はんだ付けを行う。
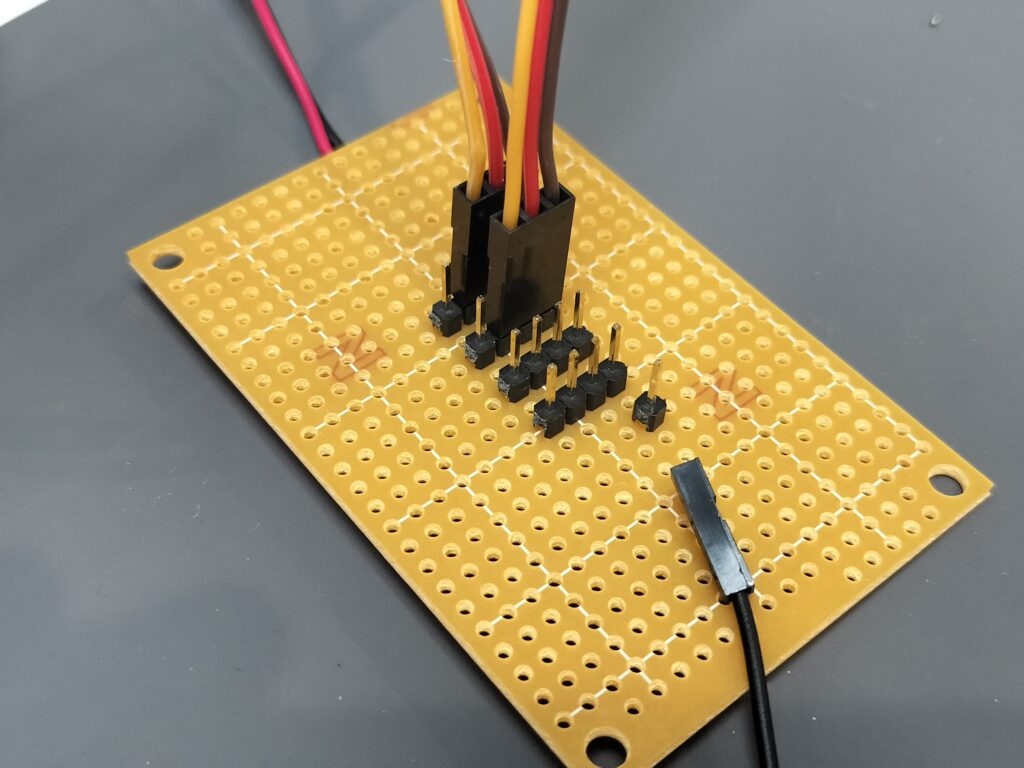
↑ コネクタ類を差し込んでいく。
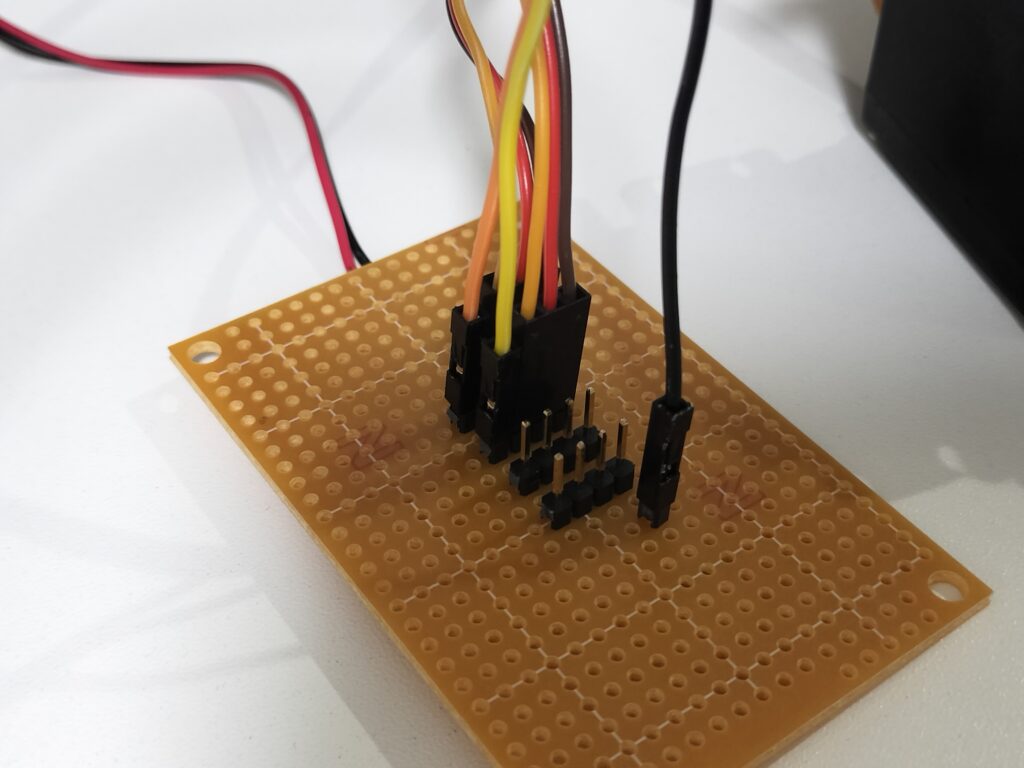
↑ こんな感じに。(ピンを4個付けたので、サーボモーター4個まで接続できる。)
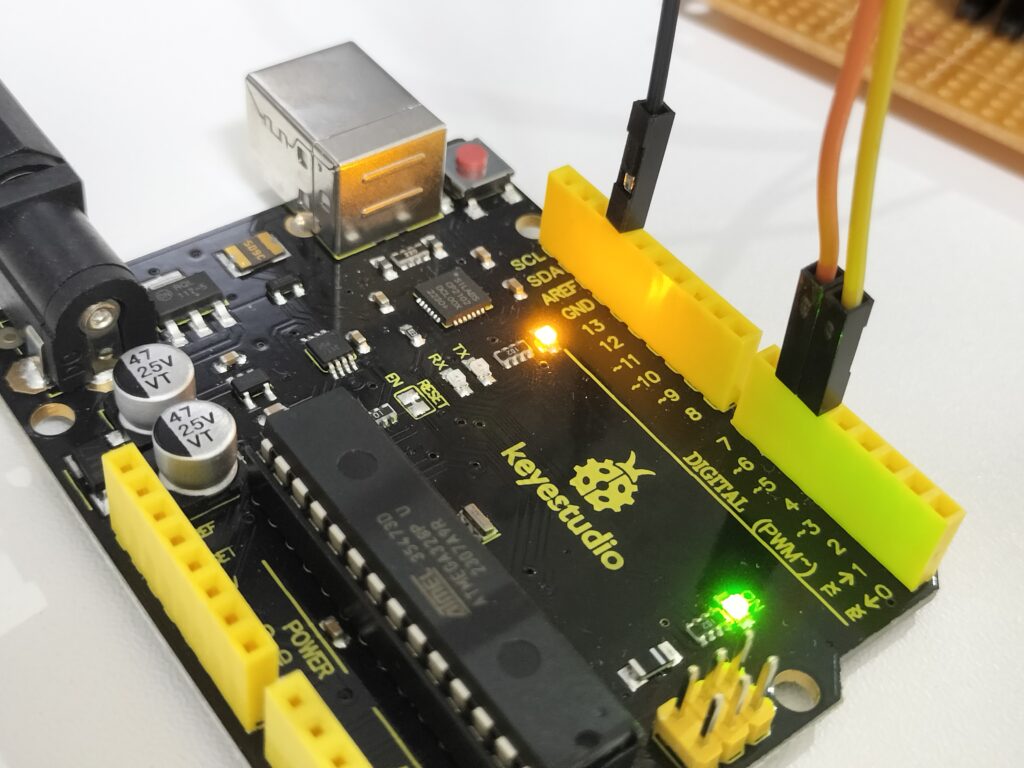
↑ Arduinoの 5番・6番・GNDピンにジャンパワイヤを差し込む。
(「~マーク」の付いているピンはサーボモーターが使える。)
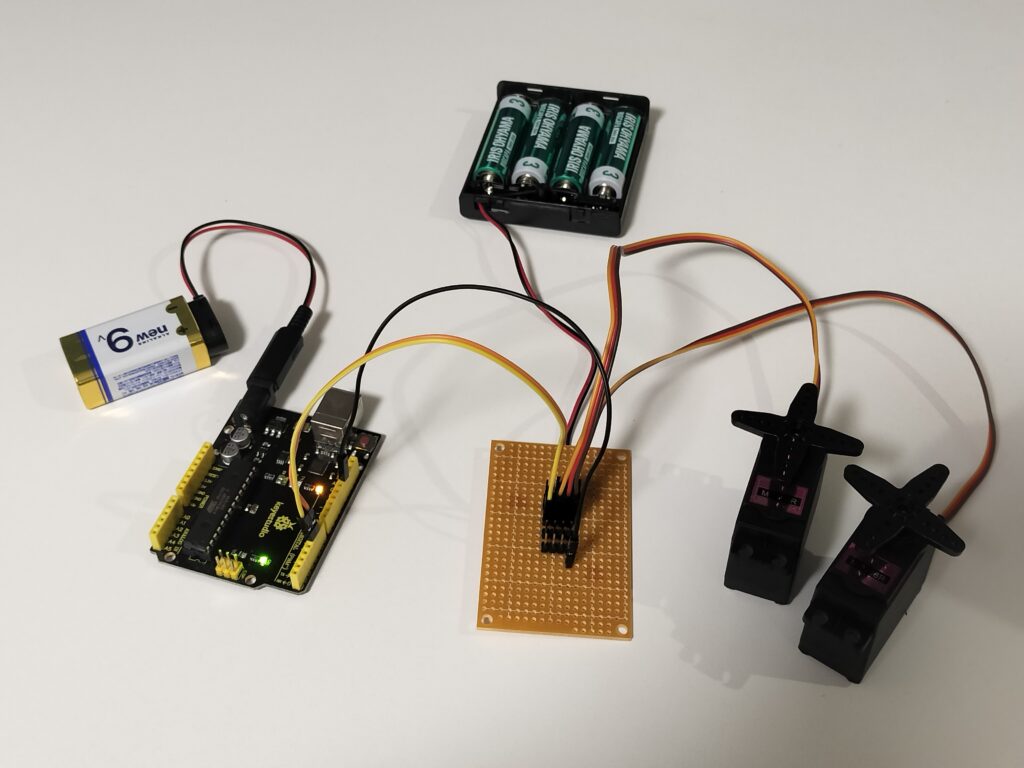
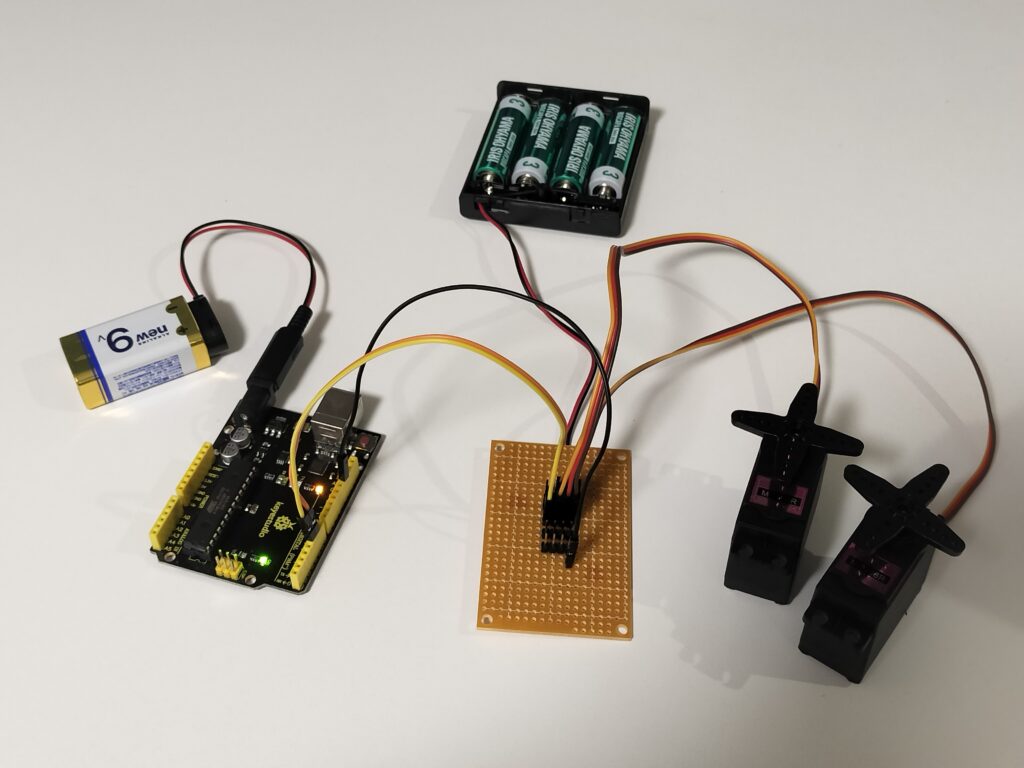
↑ 配線完了
プログラムを作成して書き込む
↓ このようなプログラムを作成して書き込みました。
#include <Servo.h>
Servo myservo1;
Servo myservo2;
void setup() {
myservo1.attach(5);
myservo2.attach(6);
}
void loop() {
myservo1.write(90);
delay(1000);
myservo2.write(90);
delay(1000);
myservo1.write(0);
delay(1000);
myservo2.write(0);
delay(1000);
}
動作確認
サーボモーターが交互に動けば成功です!